Method
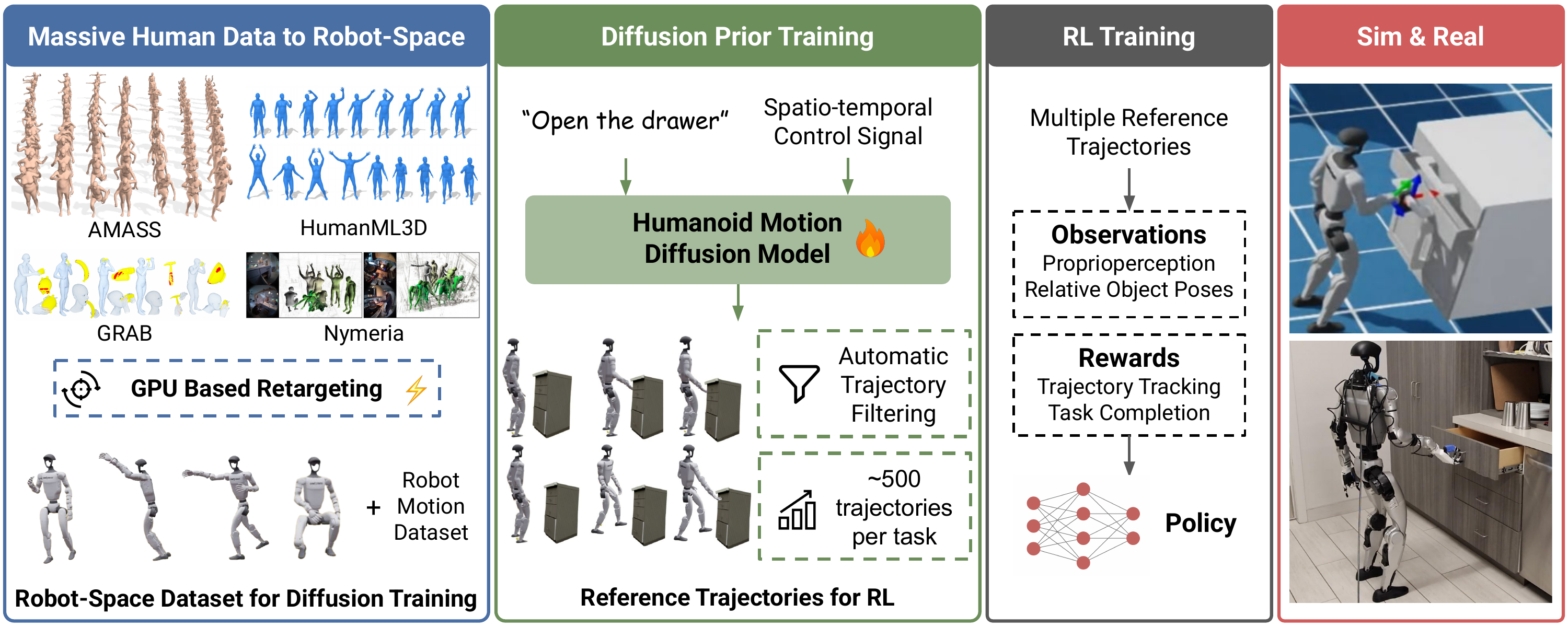
Developing robust autonomous loco-manipulation skills for humanoids remains an open problem in robotics. While RL has been applied successfully to legged locomotion, applying it to complex, interaction-rich manipulation tasks is harder given long-horizon planning challenges for manipulation. A recent approach along these lines is DreamControl, which addresses these issues by leveraging off-the-shelf human motion diffusion models as a generative prior to guide RL policies during training. In this paper, we investigate the impact of DreamControl’s motion prior and propose an improved framework that trains a guided diffusion model directly in the humanoid robot’s motion space, aggregating diverse human and robot datasets into a unified embodiment space. We demonstrate that our approach captures a wider range of skills due to the larger training data mixture and establishes a more automated pipeline by removing the need for manual filtering interventions. Furthermore, we show that scaling the generation of reference trajectories is important for achieving robust downstream RL policies. We validate our approach through extensive experiments in simulation and on a real Unitree-G1.
@article{harithas2026dreamcontrol,
title={DreamControl-v2: Simpler and Scalable Autonomous Humanoid Skills via Trainable Guided Diffusion Priors},
author={Harithas, Sudarshan and Kwak, Sangkyung and Katara, Pushkal and Deolasee, Srujan and Kalaria, Dvij and Sridhar, Srinath and Vemprala, Sai and Kapoor, Ashish and Huang, Jonathan Chung-Kuan},
journal={arXiv preprint arXiv:2604.00202},
year={2026}
}
% If you find our research useful, please consider also citing our original paper:
@article{Kalaria2025DreamControlHW,
title={DreamControl: Human-Inspired Whole-Body Humanoid Control for Scene Interaction via Guided Diffusion},
author={Dvij Kalaria and Sudarshan S. Harithas and Pushkal Katara and Sangkyung Kwak and Sarthak Bhagat and Shankar Sastry and Srinath Sridhar and Sai H. Vemprala and Ashish Kapoor and Jonathan Chung-Kuan Huang},
journal={ArXiv},
year={2025},
volume={abs/2509.14353},
}