DreamControl Methodology
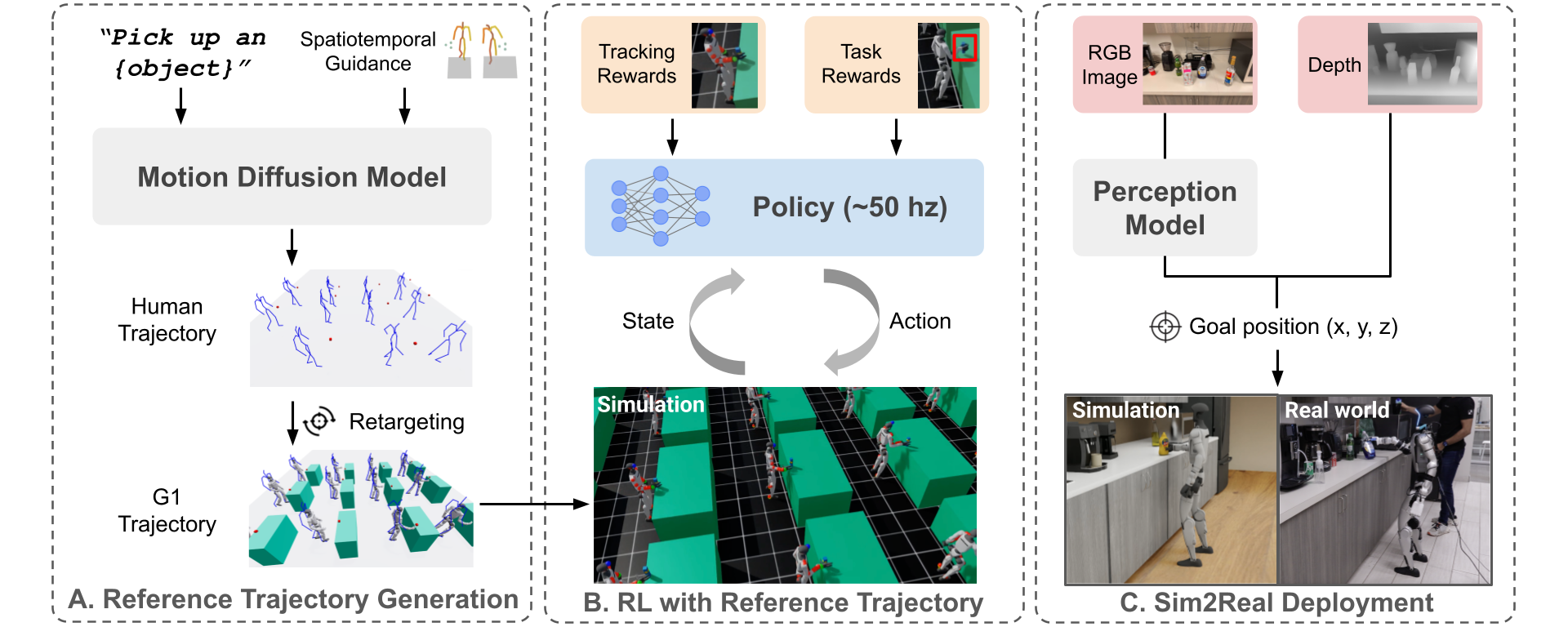
We introduce DreamControl, a novel methodology for learning autonomous whole-body humanoid skills. DreamControl~leverages the strengths of diffusion models and Reinforcement Learning (RL): our core innovation is the use of a diffusion prior trained on human motion data, which subsequently guides an RL policy in simulation to complete specific tasks of interest (e.g., opening a drawer or picking up an object). We demonstrate that this human motion-informed prior allows RL to discover solutions unattainable by direct RL, and that diffusion models inherently promote natural-looking motions, aiding in sim-to-real transfer. We validate DreamControl's effectiveness on a Unitree G1 robot across a diverse set of challenging tasks involving simultaneous lower and upper body control and object interaction.
We would like to thank Yasvi Patel for her help in recording and editing all the videos; Brandon Rishi for his help with the hardware; and Viswesh Nagaswamy Rajesh, Srujan Deolasee, and Geordie Moffatt for their help with recording videos of the robot.
@article{Kalaria2025DreamControlHW,
title={DreamControl: Human-Inspired Whole-Body Humanoid Control for Scene Interaction via Guided Diffusion},
author={Dvij Kalaria and Sudarshan S. Harithas and Pushkal Katara and Sangkyung Kwak and Sarthak Bhagat and Shankar Sastry and Srinath Sridhar and Sai H. Vemprala and Ashish Kapoor and Jonathan Chung-Kuan Huang},
journal={ArXiv},
year={2025},
volume={abs/2509.14353},
}
% If you find our research useful, please consider also citing our follow-up paper:
@article{harithas2026dreamcontrol,
title={DreamControl-v2: Simpler and Scalable Autonomous Humanoid Skills via Trainable Guided Diffusion Priors},
author={Harithas, Sudarshan and Kwak, Sangkyung and Katara, Pushkal and Deolasee, Srujan and Kalaria, Dvij and Sridhar, Srinath and Vemprala, Sai and Kapoor, Ashish and Huang, Jonathan Chung-Kuan},
journal={arXiv preprint arXiv:2604.00202},
year={2026}
}